Driving with DINO:用视觉表征破解 Sim2Real 的一致性—真实性困境
论文主页:DwD Project Page
自动驾驶的闭环验证(closed-loop evaluation)一直是一个令人头疼的问题:在真实道路上测试代价高昂,危险案例(corner cases)又极难复现;而仿真器虽然提供了近乎无限的可扩展性,却因视觉保真度不足而与现实世界存在显著的域差距(domain gap)。如何弥合这道鸿沟,一直是自动驾驶数据工程的核心命题之一。
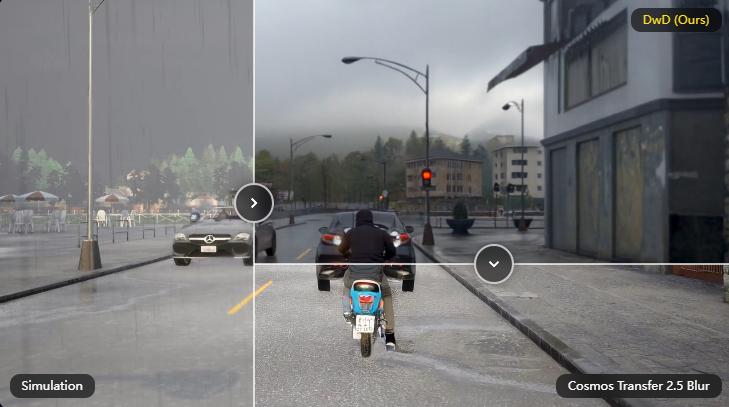
这篇博客介绍我们的工作 DwD(Driving with DINO),一个基于视觉基础模型(Vision Foundation Model, VFM)特征的可控视频扩散框架,旨在把仿真渲染视频转换为照片级真实视频,同时保持与仿真输入的几何一致性。论文已发布在 arXiv:2602.06159。

问题背景:仿真器的视觉鸿沟
像 CARLA 这样的开源驾驶仿真器,在渲染成本和场景多样性之间做出了取舍——渲染出的画面往往呈现出"游戏感"(CG-like)的视觉特征,与真实摄像头采集的图像在纹理、光照、噪声分布上存在系统性偏差。一个在仿真数据上训练好的感知模型,在真实场景下的表现往往大幅下滑,这就是所谓的 Sim2Real 迁移问题。
近年来,以 ControlNet 为代表的可控视频扩散模型提供了一条新的解法思路:用仿真画面作为结构控制信号,驱动扩散模型生成真实感图像,同时保留仿真场景的几何布局。问题的关键在于——选什么作为中间表征(intermediate representation)?
核心矛盾:一致性—真实性困境
现有方法对中间表示的选择大致分为两个方向,而这两个方向恰好站在一个根本性矛盾的两端,我们将其称为 Consistency-Realism Dilemma(一致性—真实性困境):
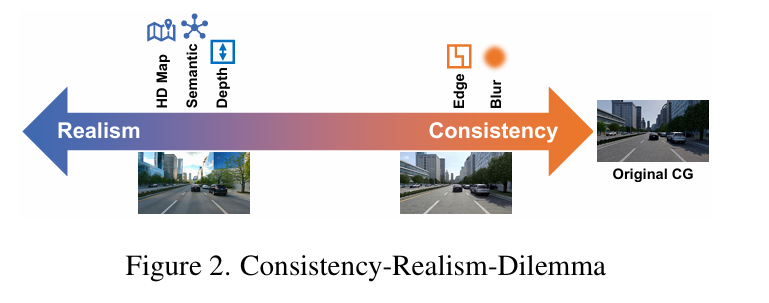
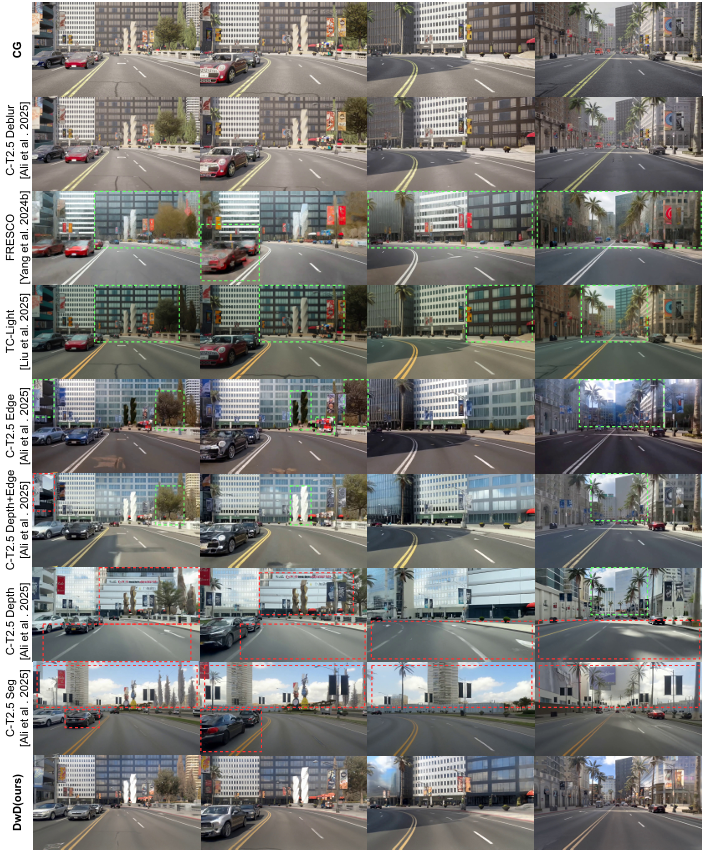
- 低层信号(边缘图、模糊图):提供精确的结构约束,但代价是把仿真的 CG 纹理"烘焙"进生成结果——扩散模型被迫沿着 CG 的边缘和色块生成,真实感大打折扣。
- 高层信号(深度图、语义图、HD Map):放弃了精细结构,允许扩散模型自由合成纹理,因而真实感更强——但结构信息的缺失会导致幻觉(hallucination),例如凭空生成不存在的车道线,或错误地改变道路布局。
有没有"既要又要"的办法?多控制分支方案尝试把低层和高层信号同时输入,但这带来了巨大的显存开销,以及不同模态之间的梯度冲突,实践中很难收敛。
我们的思路:DINO 特征作为统一桥梁
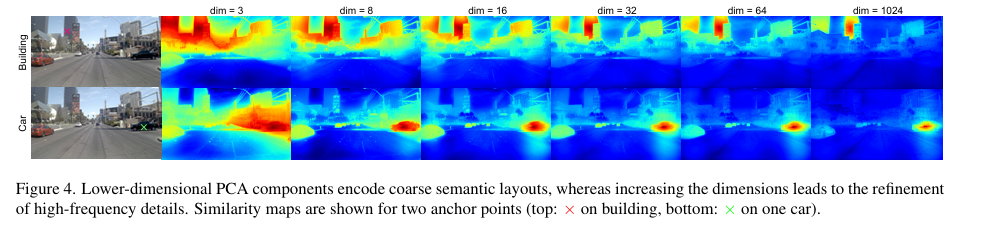
我们注意到一个有趣的特性:以 DINOv3 为代表的视觉基础模型,其特征空间天然地编码了从低层(精细纹理)到高层(语义布局)的连续谱系信息。这种多尺度的表示能力,正是 DINO 在分类、检测、分割等多粒度任务上表现出色的根本原因。
核心假设:DINO 特征可以作为一个统一的中间桥梁,同时携带足够的结构信息(对应低层控制信号的优势)和语义抽象(对应高层控制信号的优势),从而在单个控制分支内自然地调和一致性与真实性的矛盾。
然而,直接将 DINO 特征注入 ControlNet 行不通——实验表明这会导致 纹理泄漏(texture leakage):DINO 特征足够强大到可以近乎完整地重建输入图像,使得扩散模型本质上在"记忆并复制"仿真纹理,而非生成真实感图像。此外,DINOv3 的空间下采样率高达 16
DwD
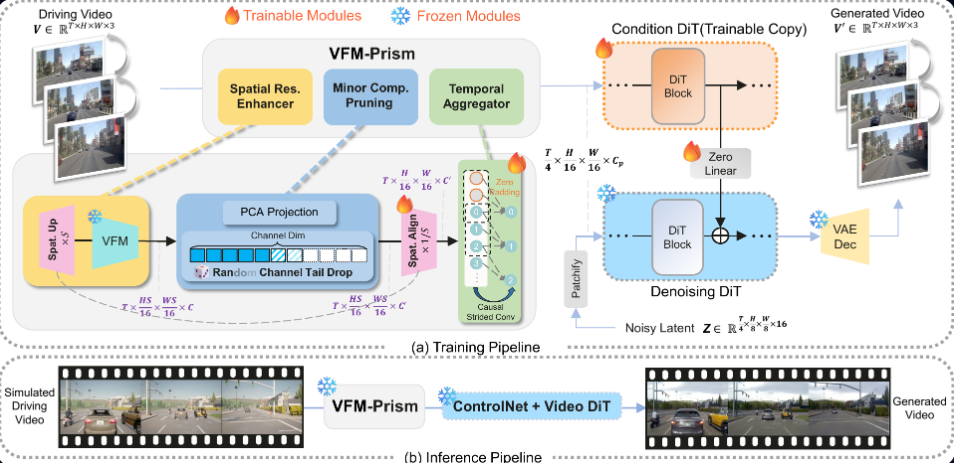
为了解决上述问题,我们提出 DwD 框架,其核心是 VFM-Prism 模块,由三个相互配合的组件构成。
1. 空间分辨率增强(Spatial Resolution Enhancer)
DINOv3 相比旧版 DINO 有一个关键优势:得益于 RoPE-box jittering 位置编码,它对高分辨率输入具有良好的鲁棒性。我们利用这一特性,在送入 DINO 编码器之前,先将输入视频上采样
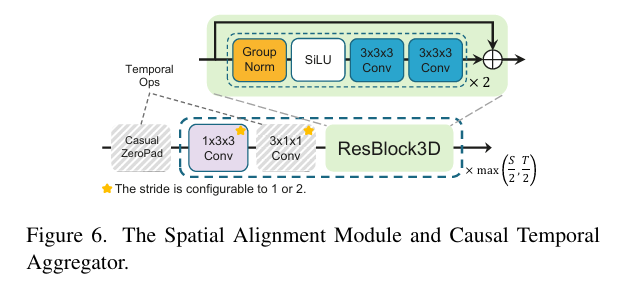
这一做法在输入空间(而非特征空间)进行上采样,实验表明优于 Featup、Anyup 等后验特征上采样方案,能更好地保留对象边界的结构细节。随之引入的尺寸不匹配,由 Spatial Alignment Module(步长卷积 + 残差块)来弥合,将特征图压缩回 DiT 所需的
2. 次要成分剪枝(Minor Components Pruning)
这是处理纹理泄漏的核心机制。我们采用 PCA 将高维 DINO 特征投影到
然而,硬性截断有一个隐患:结构信息与外观信息的边界在特征空间中并不清晰,过激的维度削减(如
为此,我们提出 随机通道尾部剪枝(Random Channel Tail Drop):训练时不使用固定的截断阈值,而是从预定义集合
在推理阶段,
3. 因果时序聚合器(Causal Temporal Aggregator)
DINOv3 对每帧独立编码,导致时序维度上存在大量冗余,且与 DiT 块的输入需求在时间维度上不匹配。朴素的关键帧采样或双线性插值会破坏运动连续性,引发时序混叠(temporal aliasing)和运动模糊。
我们在 Spatial Alignment Module 中插入 因果卷积块,以因果方式对时序维度进行降采样。因果卷积的核心优势在于:每一帧的输出仅依赖于当前帧及历史帧,而不受未来帧的影响。这种历史上下文的显式保留,能有效抑制帧间抖动,提升生成视频的时序稳定性。
实验结果
数据集:在 nuPlan 数据集上训练,在 CARLA 仿真渲染的视频上进行评估。
评估维度:
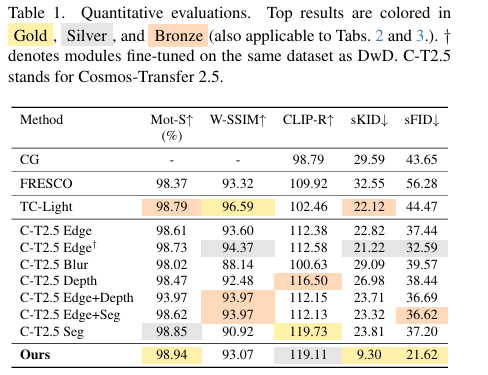
- 视觉保真度:sFID / sKID(特征分布距离,采用语义感知采样策略构建 40 万对对齐样本)
- 感知真实感:CLIP-Real(正/负提示词嵌入比值,量化与真实摄影的对齐程度)
- 时序一致性:Motion-S(运动合理性)和 WarpSSIM(光流 warping 后的帧间结构相似性)
- Sim2Real 一致性:mIoU(用预训练语义分割模型对比生成帧与仿真 GT 的语义一致性)
实验结论:
- 在 sFID/sKID 上,DwD 大幅领先所有 baseline,包括低层控制(边缘、模糊)和高层控制(深度、语义、HD Map)方法
- CLIP-Real 与深度/语义等高层方法持平,远优于低层方法(后者实质上在复制 CG 纹理,CLIP-Real 与 CG 基准相差无几)
- 时序一致性全面优于基于高层信号的方法,略逊于边缘方法(后者高度保留 CG 结构故 WarpSSIM 偏高,但代价是完全丧失真实感)
- mIoU 与低层控制信号相当,验证了几何一致性未因真实感提升而牺牲
消融分析关键发现: -
- 空间上采样倍数
- 因果时序聚合器同时改善了 WarpSSIM 和 sFID/sKID,主因是显著减少了模糊帧和失真帧的比例
关于"一致性—真实性困境"的再思考
回顾整个工作,DwD 的本质是把"选哪种控制信号"这一离散的工程决策,转化为 DINO 特征空间内一个连续的权衡旋钮(通过
这种思路或许对其他模态迁移问题也有一定启发:当两种需求存在内在张力时,与其设计两个相互竞争的专用模块,不如寻找一个天然编码了两者的统一表示,再通过轻量级的后处理来调节平衡点。
总结
DwD 以 DINOv3 特征作为仿真与现实之间的统一语义桥梁,通过 VFM-Prism 的三个组件(空间分辨率增强、次要成分剪枝与随机通道尾部剪枝、因果时序聚合器)系统性地解决了纹理泄漏、空间压缩和时序冗余三个核心挑战。实验结果验证了这一设计在视觉保真度、感知真实感、时序稳定性和 Sim2Real 一致性上的全面优势。
后续工作将探索在更大规模、更高分辨率的驾驶数据集上的扩展能力,以及 DwD 在闭环自动驾驶系统中的实际部署潜力。